Kurs AVR-GCC cz.2
 W pierwszej części kursu instalowaliśmy na komputerze pakiet programów WinAVR, uczyliśmy się kompilować kody źródłowe programów oraz zapisywać programy do pamięci flash mikrokontrolera AVR. Teraz zaczniemy pisać proste programy w języku C - nauczymy się jak używać portów równoległych wejścia/wyjścia AVRa.
Zaczynamy od naprawdę prostych przykładów :), zupełnie od zera. Jeśli i tak coś w tekście będzie niezrozumiałe, to nie należy szybko się zniechęcać, w trakcie dalszej lektury kursu powinno się wyjaśnić.
W pierwszej części kursu instalowaliśmy na komputerze pakiet programów WinAVR, uczyliśmy się kompilować kody źródłowe programów oraz zapisywać programy do pamięci flash mikrokontrolera AVR. Teraz zaczniemy pisać proste programy w języku C - nauczymy się jak używać portów równoległych wejścia/wyjścia AVRa.
Zaczynamy od naprawdę prostych przykładów :), zupełnie od zera. Jeśli i tak coś w tekście będzie niezrozumiałe, to nie należy szybko się zniechęcać, w trakcie dalszej lektury kursu powinno się wyjaśnić.
Zakładam, że czytelnik zrobił zadanie domowe, które zadałem na zakończenie pierwszej części kursu:) Należało poczytać w internecie na temat zapisu liczb w systemach dwójkowym i szesnastkowym oraz o funkcjach logicznych AND, OR, NOT i XOR.
Równoległe porty wejścia/wyjścia
Układ atmega8 w obudowie DIP28, na którym będziemy uruchamiać przykładowe programy, posiada 28 wyprowadzeń, z których 23 mogą służyć jako uniwersalne binarne wejścia/wyjścia. Linie we/wy atmega8 podzielone są na trzy grupy, nazwane: PORTB, PORTC i PORTD. Mikrokontrolery AVR w obudowach DIP40(atmega16, atmega32) posiadają cztery porty: A,B,C,D; natomiast attiny2313 w obudowie DIP20, posiada: PORTA (tylko PA0..PA2), PORTB i PORTD(PD0..PD6).
PORTB układu atemga8 posiada osiem linii we/wy (PB0..PB7), ale jeśli zamierzamy podłączyć do mikrokontrolera rezonator, to linie PB6 i PB7 odpadają. Z kolei wyprowadzenia: 17(PB3), 18(PB4) i 19(PB5) wykorzystywanie są przy programowaniu szeregowym ISP pamięci flash mikrokontrolera. PORTC uC atmaga8 posiada 7 linii we/wy (PC0..PC6), ale wyprowadzenie 1(PC6) normalnie pełni rolę wejścia sygnału reset mikroprocesora. Aby wykorzystywać wyprowadzenie 1(PC6) atmeg8 jako kolejną linię portu we/wy, potrzeba zaprogramować fuse-bit RSTDISBL (na temat fuse-bitów będę pisał), lecz w ten sposób pozbawimy się możliwości programowania szeregowego ISP pamięci FLASH mikrokontrolera. PORTD atmega8 posiada 8 linii we/wy (PD0..PD7).

Rozkład wyprowadzeń mikrokontrolera ATmega8
Każda z wymienionych linii we/wy układu atmega8 może zostać indywidualnie skonfigurowana jako binarne wejście lub wyjście. Domyślnie wszystkie ustawione są wejściami z wyjątkiem wyprowadzenia 1 (RESET|PC6), które jest normalnie w atmega8 wejściem sygnału RESET mikroprocesora.
Program kontroluje układy peryferyjne mikrokontrolera AVR poprzez "rejestry I/O", 64 8-bitowe rejestry I/O znajdują się w przestrzeni adresowej pamięci danych - program może zapisywać do "rejestrów I/O" lub odczytywać z nich jakby korzystał z pamięci RAM. W zbiorze instrukcji języka maszynowego uC AVR istnieją też specjalne rozkazy służące do odczytu(zapisu) zawartości rejestrów I/O, także rozkazy do manipulowani poszczególnymi bitami rejestrów. W jaki sposób można w AVR-GCC odczytywać i zapisywać rejestry I/O pokażę za chwilę, przy objaśnianiu przykładowych programów.
Z każdym z równoległych portów we/wy: A,B,C,D powiązane są po trzy rejestry I/O, o nazwach: DDRx, PORTx, PINx, gdzie x to oczywiście litery A,B,C,D. Stan poszczególnych bitów rejestrów DDRx (Port Data Direction Register) decyduje czy odpowiadające im linie są wejściami, czy wyjściami (0-wejście, 1-wyjście).
Jeśli dana linia we/wy pracuje jako wyjście, wtedy ustawiając na wartość 1 odpowiadający tej linii bit w rejestrze PORTx (Port Data Register), wymuszamy na wyprowadzeniu stan wysoki napięcia, a ustawiając wartość bitu na 0, oczywiście stan niski.
Jeśli linię we/wy skonfigurowano jako wejście, poziom napięcia na wyprowadzeniu, niski czy wysoki, sprawdza się odczytując wartość odpowiadającego tej linii bitu w rejestrze PINx (Port Input Pins Address), oczywiście wartość 0 oznacza stan niski, 1 stan wysoki. Dodatkowo, gdy linia jest wejściem i odpowiadający tej linii bit w rejestrze PORTx ma wartość 1, wtedy wyprowadzenie jest wewnętrznie podciągnięta do napięcia zasilania.
| DDRx.n | PORTx.n | Px.n |
|---|---|---|
| 0 | 0 | wejście |
| 0 | 1 | wejście z podciągnięciem do VCC |
| 1 | X | wyjście |
A teraz przykład konfiguracji portu B, patrzymy na ilustrację poniżej.
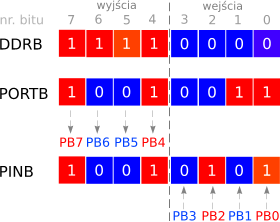
Przykład konfiguracji portu B
Cztery pierwsze bity rejestru DDRB mają wartość "0", zaś pozostałe cztery bity wartość "1", więc linie PB3..PB0 są skonfigurowane jako wejścia, a linie PB7..PB4 jako wyjścia. Dodatkowo bity numer 1 i 0 w rejestrze PORTB ustawione zostały na wartość 1, zatem linie PB1 i PB0 będą pracować jako wejścia z wewnętrznym podciągnięciem do napięcia zasilania. Zmieniając wartości bitów 7..4 rejestru PORTB można wymusić oczekiwane stany napięcia(wysoki lub niski) na wyprowadzeniach PB7..PB4. Natomiast stan wejść (PB3..PB0) sprawdzamy odczytując bity 3..0 rejestru PINB. W przykładzie do wyprowadzeń PB3..PB0 podano poziomy napięć L H L H, więc w rejestrze PINB bity 3..0 mają wartości 0101. Bity 7..4 rejestru PORTB ustawiono na wartości 1001, zatem na wyprowadzeniach PB7..PB4 pojawiły się stany napięć H L L H.
Schematy połączeń
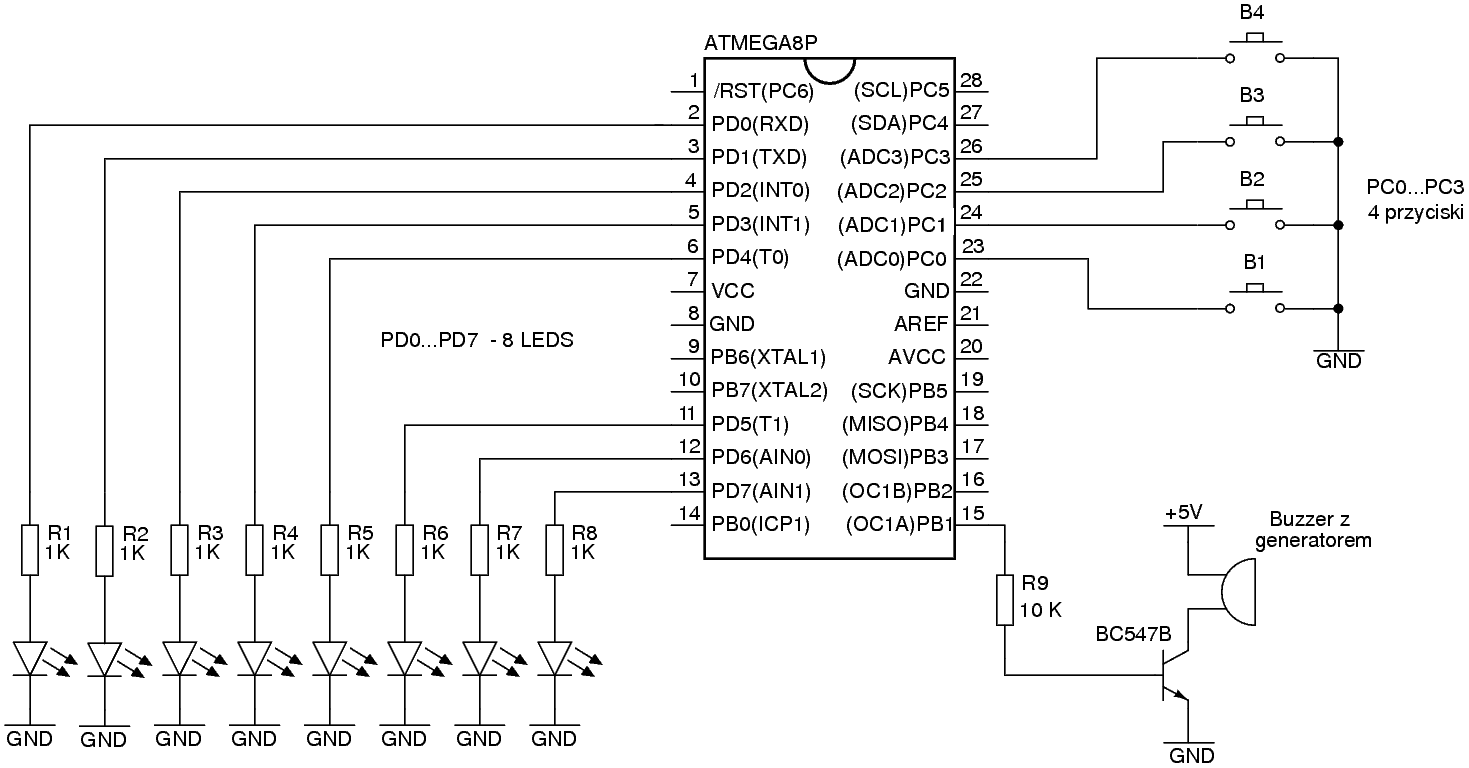
Oprócz mikro_kontrolera AVR, dla uruchomienia przykładowych programików, potrzebne będą: osiem diod LED, cztery miniaturowe przyciski monostabilne oraz buzzer z generatorem. Diody LED przyłączone będą do portu D, przyciski do linii PC0..PC3, a buzzer do PB1. Każda z ośmiu diod LED, wraz z rezystorem ograniczającym prąd, przyłączona jest między wyprowadzenie portu a masę, więc będzie się świecić, kiedy do odpowiedniego bitu rejestru wpiszemy wartość "1".
Przyciski przyłączone są do linii we/wy portu C w taki sposób, że przy wciśnięciu zwierają dane wyprowadzenie układu z masą, więc przy wciśniętym przycisku z rejestru PINC odczytamy wartość odpowiedniego bitu "0", a przy zwolnionym przycisku, odczytamy "1". Linie we/wy z przyłączonymi w ten sposób przyciskami należy skonfigurować jako wejścia z podciągnięciem do VCC.

Sposób przyłączenia przycisku do portu we/wy uC AVR
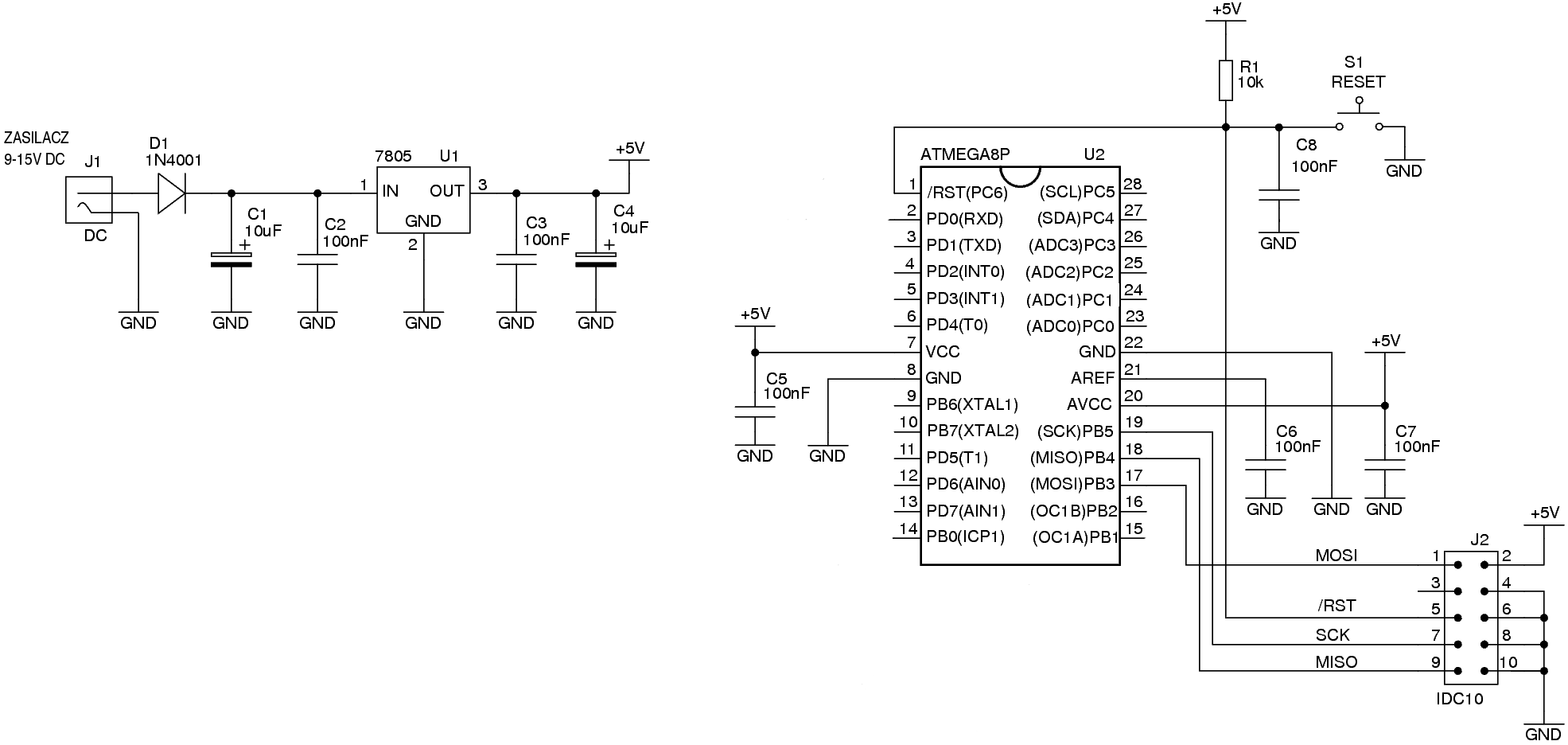
Dla przejrzystości schemat połączeń rozdzieliłem na dwa. Pierwszy schemat przedstawia sposób przyłączenia do atmega8 zasilania, resetu oraz programatora ISP, na drugim schemacie widać sposób podłączenie do portów we/wy mikro_kontrolera diod LED, przycisków i buzzera.
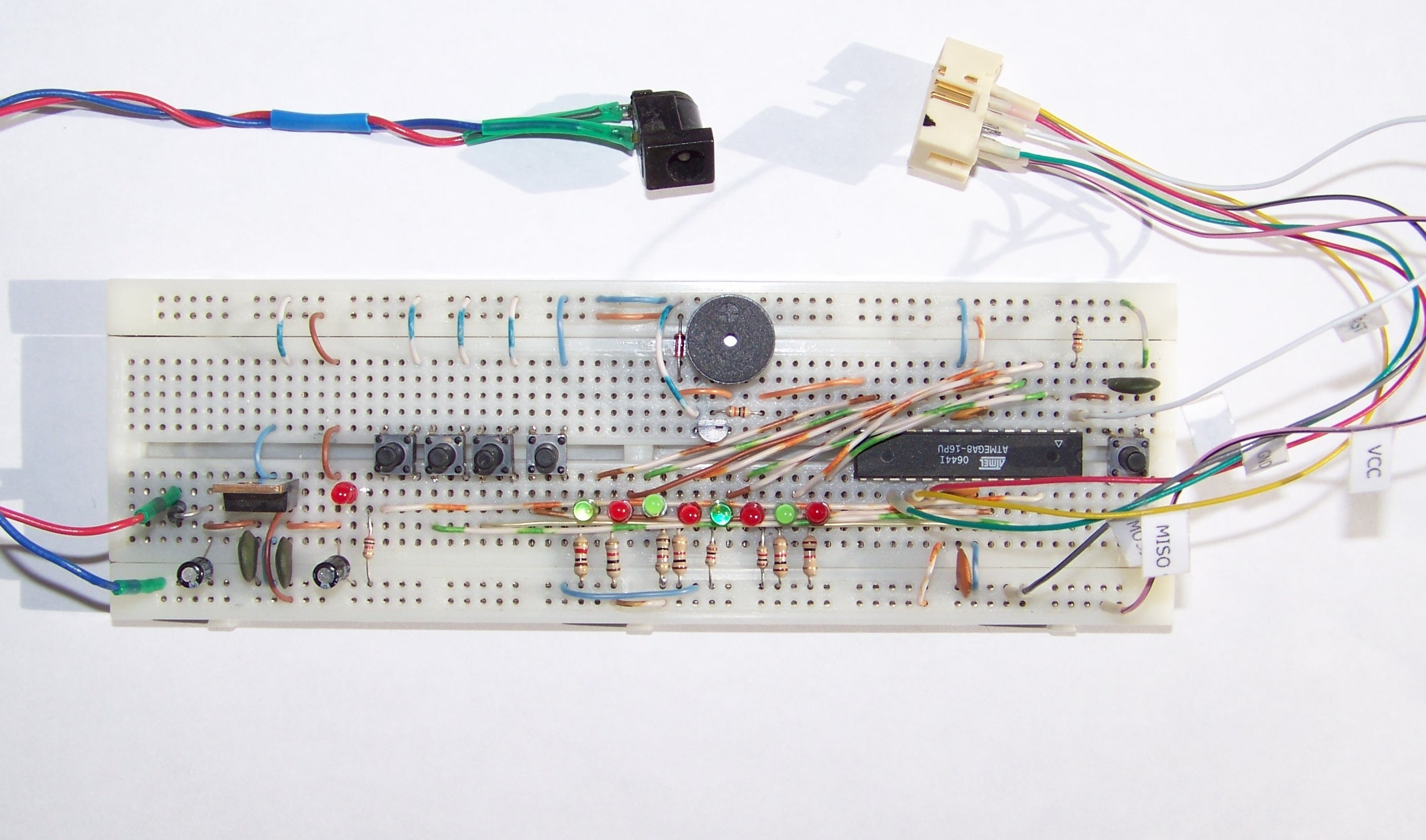
Ja zestawiłem wszystkie części na małej płytce stykowej.
Szkielet prostego programu dla avr-gcc
Wszystkie przykładowe programy z tej części kursy będą wyglądać podobnie, poniżej znajduje się szkielet prostego programu dla AVR-GCC.
/* Szkielet prostego programu dla avr-gcc */ #define F_CPU 1000000L #include <avr/io.h> #include <util/delay.h> int main(void) { /* Tutaj wpisujemy instrukcje naszego programu */ for(;;) { /* Instrukcje można umieścić w nieskończonej pętli */ } }
Pierwsza linia to komentarz.
/* Szkielet prostego programu dla avr-gcc */
Komentarze są pomijanie przez kompilator, zwykle objaśniają mniej oczywiste fragmenty kodu. GCC pozwala wstawiać komentarze na dwa sposoby. Pierwszy sposób to objęcie treści komentarza parą ograniczników: '/*' , '*/'; w ten sposób utworzony komentarz może zawierać wiele linii tekstu.
Drugi sposób to umieszczenie przed treścią komentarza dwóch znaków slash '//' , tak utworzony komentarz rozciąga tylko do końca linii.
// Komentarz liniowy
A czy GCC pozwala zakomentowywać inne komentarze ? Proszę to sprawdzić samemu :)
Kolejne trzy linijki to polecenia preprocesora.
Polecenia preprocesora zaczynają się znakiem hash "#". Preprocesor języka C przeprowadza rozmaite operacje na tekście programu jeszcze przed rozpoczęciem "właściwej" kompilacji programu. Na przykład pierwsze z tych trzech poleceń zmienia w tekście programu wszystkie wystąpienia ciągu znaków "F_CPU" na "1000000L", jak opcja "replace" w edytorze teksu. Liczba ta jest częstotliwością taktowania mikrokontrolera podaną w Hz. Nowe układy atmega skonfigurowane są do pracy z wewnętrznym oscylatorem RC 1Mz, dla przykładowych programików z tej części kursu nie ma potrzeby tego zmieniać. Inne częstotliwości taktowania mikrokontrolera atmaga można wybrać programując odpowiednie fuse-bity, napiszę o tym w dalszej części kursu. Drugie polecenie dołącza (wkleja) do tekstu programu, w miejscu jego wystąpienia, zawartość pliku "include/avr/io.h"; podobnie trzecie polecenie dołącza zawartość pliku "include/util/delay.h" A co takiego zawierają te pliki? Są to pliki tekstowe, więc ich zawartość można przejrzeć w dowolnym edytorze tekstu. Plik "include/avr/io.h" zawiera definicje rejestrów, bitów i przerwań; zaś plik "include/util/delay.h" zawiera funkcje wstrzymujących działanie programu na zadany okres czasu. Temat preprocesora zostanie dalej w kursie szczegółowo omówiony.
Następny fragment listingu to początek "głównej" funkcji programu.
Funkcja w języku C to najprościej mówiąc wydzielony z programu fragment kodu, wykonujący jakieś konkretne zadanie. Odpowiednikiem funkcji z C w innych językach programowania są procedura i podprogram. Każda funkcja posada własną nazwę, nadaną jej przy tworzeniu, posługując się nazwą funkcji można wielokrotnie, dowolnym miejscu programu, uruchamiać blok instrukcji zawarty w funkcji, tak jak by to była pojedyncza instrukcja. Programy podzielone są zwykle na wiele mniejszych funkcji, dzięki temu są bardziej czytelne i oszczędza się pamięć. Funkcje można tworzyć (definiować) samemu, a także korzysta się z gotowych funkcji z bibliotek dostarczonych wraz z kompilatorem. Każdy program w C musi zawierać funkcję o nazwie "main" (funkcja główna), ponieważ pierwsza instrukcja funkcji "main" jest jednocześnie pierwszą instrukcją całego programu. Przykładowe programy w tej części kursu będą zawierać jedynie funkcję "main", cały nasz kod będzie umieszczany w głównej funkcji, między nawiasami klamrowymi "{","}".
W naszych prostych, przykładowych programach będzie można wyróżnić dwie sekcje, pierwsza to instrukcje wykonywane raz jeden, natychmiast po starcie programu, a druga sekcja to blok instrukcji wykonywany wielokrotnie w nieskończonej pętli. Nieskończoną pętle w programie można zbudować używając instrukcji "for" lub "while", w taki sposób, jak w przykładzie poniżej. W obu przypadkach instrukcje we wnętrzu pętli objęte są parą nawiasów klamrowych "{","}", podobnie jak zawartość całej funkcji głównej "main". Instrukcje tworzące pętle: "for" i "while" omówię szczegółowo w dalszej części kursu, ale już teraz będziemy je wykorzystywać w naszych przykładowych programach.
Programujemy porty we/wy
Jak pisałem, zaczniemy od naprawdę prostych przykładów. Pierwszy program będzie powodował miganie ośmiu diod LED przyłączonych do wyprowadzeń skojarzonych z portem D. Diody mają świecić się na przemian, raz parzyste, raz nieparzyste. Tak, jak pokazuje to animacja poniżej.
/* przykład 2.1 "leds.c" */ /* 8 diod LED przłączonych do portu D */ /* ATmega 1MHz */ #define F_CPU 1000000L #include <avr/io.h> #include <util/delay.h> int main(void) { /* Wszystkie linie portu D będą wyjściami */ DDRD = 0xFF; /* 0xFF binarnie 1111 1111 */ /* Początek nieskończonej pętli */ while(1) { PORTD = 0xaa; /* 0xaa binarnie 1010 1010 */ /* opóźnienie 0.33 sek. */ _delay_ms(330); PORTD = 0x55; /* 0x55 binarnie 0101 0101 */ /* opóźnienie 0.33 sek. */ _delay_ms(330); } }
Efekt działania programu z listingu 2.1
Pierwszą instrukcją (będę tłumaczył zaczynając od wnętrza funkcji głównej "main") ładujemy do rejestru DDRD wartość 0xff (postać szesnastkowa liczby), w ten sposób konfigurujemy wszystkie linie portu D jako wyjścia.
Używając nazwy rejestru i operatora przypisania - znaku "=", można zapisać(odczytać) całą 8-bitową zawartość rejestru I/O, instrukcję przypisania należy zakończyć znakiem średnika, inaczej kompilacja zakończy się z błędem. Należy też pamiętać o dołączeniu do kodu plików z definicjami rejestrów I/O, wstawiając gdzieś na początku programu linię:
Inaczej kompilator nie rozpozna nazw rejestrów I/0 i przerwie kompilację wysyłając komunikat o wielu błędach.
W tekście programu można umieszczać stałe liczby (tzw. literały) w postaci dziesiętnej, szesnastkowej oraz ósemkowej, natomiast standard języka C nie przewiduje możliwości zapisywania stałych w postaci dwójkowej. Postać szesnastkową liczby stałej tworzymy wstawiając przed liczbą parę znaków '0x' lub '0X' (np. 0xFF), stałe ósemkowe rozpoczynają się od cyfry "0" (np. 077), liczby w systemie dziesiątkowym wpisujemy zwyczajnie (np. 123).
Kolejne dwie linie to początek nieskończonej pętli utowrzonej instrukcją "while". Wykonanie bloku instrukcji po "while(1)", objętych parą nawiasów klamrowych "{","}", będzie powtarzane, aż do momentu odłączenia zasilania lub resetu mikroprocesora
Pierwsza instrukcja w pętli zapisuje do rejestru PORTD wartość 0xAA ( binarnie 1010 1010), zaświecą się diody LED przyłączone do wyprowadzeń: PD1,PD3,PD5 i PD7; pozostałe diody będą wygaszone.
Kolejna linijka wprowadza w tym miejscu programu opóźnienie ok 0.33 sek. Na razie nie będę szczegółowo objaśniał tej instrukcji, bo nie jest dobrze tłumaczyć zbyt wielu rzeczach na raz. Będziemy wstawiać tę linię do naszych przykładów tam, gdzie potrzebne będzie opóźnienie, w kolejnej części kursu dokładnie wyjaśnię działanie tej instrukcji. Długość opóźnienia wpisujemy tam gdzie jest liczba 330, w tysięcznych częściach sekundy.
W następnej linii do rejestru PORTD ładowana jest wartość 0x55( dwójkowo 0101 0101), tym razem zaświecą się diody LED przyłączone do wyprowadzeń PD0,PD2,PD4 i PD6. I ponownie działanie programu zostanie wstrzymane na okres ok 0.33 sek.
Dalej, pierwszy nawias klamrowy kończy blok instrukcji wykonywanych w pętli, kolejny nawias oznacza koniec funkcji głównej "main".
W pierwszym przykładzie zapisywana była cała zawartość rejestru PORTD, w kolejnym programie pokażę jak ustawiać i kasować poszczególne bity rejestrów.
Zanim zacznę objaśniać program, to omówię operacje bitowe. Operacje bitowe działają na wartościach całkowitych i służą do manipulowania bitami. W języku C jest sześć operatorów bitowych:|,&,^,<<,>>,~. Operatory te są szczególnie użyteczne przy zabawie z bitami rejestrów, więc już teraz wyjaśnię ich działanie na przykładach. Oczywiście w przykładach liczby przedstawione są w postaci dwójkowej.
Drugi programik różni się niewiele od pierwszego, więc omówię tylko te linie gdzie, gdzie można znaleźć coś nowego.
/* przykład 2.2 "leds2.c" */ /* 8 diod LED przłączonych do portu D */ /* ATmega 1MHz */ #define F_CPU 1000000L #include <avr/io.h> #include <util/delay.h> int main(void) { /* Wszystkie linie portu D będą wyjściami */ DDRD = 0xFF; /* Początek nieskończonej pętli */ for(;;) { PORTD = 0x0f; /* Ładuje do PORTD wartość 0x0f*/ /* opóźnienie 1 sek. */ _delay_ms(1000); PORTD |= 0xf0; /* ustawia bity nr. 4..7 */ _delay_ms(1000); PORTD &= 0xaa; /* zeruje bity nr. 0,2,4,6 */ _delay_ms(1000); PORTD ^= 0x0f; /* "odwraca" bity nr. 0..3 */ _delay_ms(1000); PORTD = 0x00; /* opóźnienie 2 sek. */ _delay_ms(2000); } }
Efekt działania programu z listingu 2.2
Wybrane bity rejestru można ustawić na wartość "1", bez zmiany wartości pozostałych bitów rejestru, używając operatora przypisania "|=", instrukcja przypisania kończy się średnikem.
Na zawartości rejestru PORTD wykonywana jest operacja bitowa OR z wartością stałej znajdującej się po prawej stronie operatora "|=", a następnie wynik operacji zapisywany jest do rejestru PORTD.
W kodach źródłówych programów spotyka się następujący sposób ustawiania wybranych bitów rejestru.
W tym przykładzie, zostaną ustawione bity numer: 3,5,7 rejestru PORTC (bity w rejestrze numerowane są zaczynając od zera), pozostałe bity pozostaną niezmienione. Użyto operatorów bitowych: "|"- bitowe OR, "<<" - przesunięcie w lewo.
Wracamy do naszego programu. Wybrane bity rejestru można ustawiać na wartość "0", bez zmiany pozostałych bitów rejestru, używając instrukcji przypisania "&="
Na zawartości rejestru PORTD wykonywana jest operacja bitowa AND z wartością stałej znajdującej się po prawej stronie operatora "&=", a następnie wynik operacji zapisywany jest do rejestru PORTD.
Wybrane bity rejestru można "odwrócić", tzn. zmieniać wartość bitu "1" na "0", a "0" na "1", bez zmiany pozostałych bitów rejestru, używając instrukcji przypisania "^="
Na zawartości rejestru PORTD wykonywana jest operacja bitowa XOR z wartością stałej znajdującej się po prawej stronie operatora "^=", a następnie wynik operacji zapisywany jest do rejestru PORTD.
Trzeci przykładowy program pokazuje jak odczytać całą zawrtość rejestru
/* przykład 2.3 "leds3.c" */ /* 8 diod LED przłączonych do portu D */ /* 4 przyciski przyłączone do PC0..PC3 */ /* ATmega 1MHz */ #define F_CPU 1000000L #include <avr/io.h> #include <util/delay.h> int main(void) { /* Wszystkie linie portu D będą wyjściami */ DDRD = 0xff; /* Linie portu C będą wejściami z podciągnięciem do VCC */ DDRC = 0x00; PORTC = 0xff; /* Początek nieskończonej pętli */ for(;;) { /* Przepisanie zawartości PINC do PORTD */ PORTD = PINC; //PORTD = ~PINC & 0x0f; } }
Wpierw linie we/wy portu C zostają skonfigurowane jako wejścia podciągnięte do VCC, a linie portu D wyjścia. Dalej, w nieskończonej pętli, z użyciem operatora przypisania "=", zawartość rejestru PINC jest bezpośrednio przepisywana do rejestru PORTD.
Normalnie cztery pierwsze diody LED przyłączone do linii PD0..PD3 będą się świecić, wciśnięcie któregoś z przycisków powoduje wygaszenie odpowiedniej diody LED.
W kolejnych przykładach potrzebna będzie instrukcja "if-else" wykorzystywana do podejmowania decyzji.
Część "else" , czyli instrukcje wykonywaną gdy FAŁSZ można pominąć.
Obejmując fragment kodu parą klamrowych nawiasów "{","}" tworzymy tzw. blok instrukcji, blok w "if-else" jest traktowany jako pojedyncza instrukcja.
Chcąc sprawdzić czy jeden lub grupa bitów jednocześnie w rejestrze I/0 ma wartość "1" można to zrobić z użyciem instrukcji "if" w następujący sposób:
Gdzie "REJESTR_IO" to nazwa rejestru, a "MASKA" to stała wartość z ustawionymi tymi bitami, które potrzeba testować
Przykłady:
Na zawartości rejestru wykonywana jest operacja bitowa AND z wartością stałej stojącej po prawej stronie operatora "&". I jeśli wynik tej operacji będzie różnił się od zera, to całe wyrażenie w nawiasach okrągłych będzie uznane jako wartość logiczną "PRAWDA" i wykonane zostaną instrukcje objęte nawiasami klamrowymi po "if"; w przeciwnym przypadku instrukcje te zostaną pominięte. W języku C, jeżeli jakieś wyrażenie po obliczeniu jest różne od zera, to ma wartość logiczną "PRAWDA", a jeżeli wyrażenie jest równe zero, to ma wartość logiczną "FAŁSZ".
A po co na wartości odczytanej z rejestru wykonywana jest bitową operację AND? Żeby przysłonić te bity rejestru, których wartości nas nie interesują. Przykład:
Jednak na schemacie przyciski przyłączono do portów we/wy uC w taki sposób, że przy wciśniętym przycisku odczytujemy z rejestru wartość bitu "0", a nie "1".Tak można sprawdzić czy jeden lub grupa bitów w rejestrze I/0 ma wartość "0":
Przykłady:
Tutaj bitowy iloczyn zawartości rejestru i stałej został dodatkowo wzięty w okrągłe nawiasy i wartość logiczna całości została zanegowana z użyciem operatora wykrzyknik "!". Znak wykrzyknik "!" jest w języku C logicznym operatorem negacji, zmienia wartość logiczną PRAWDA na FAŁSZ, A wartość FAŁSZ na PRAWDA. A jak pisałem przed chwilą, jeżeli jakieś wyrażenie po obliczeniu jest większe od zera to ma wartość logiczną "PRAWDA", a jeżeli równe zero to ma wartość logiczną "FAŁSZ".
A jeśli potrzeba, aby blok instrukcji wykonywał się wielokrotnie w pętli, dopóki jeden lub grupa bitów jednocześnie w rejestrze I/0 ma wartość "1", to można to zrobić z użyciem instrukcji "while":
A jeśli potrzeba, aby blok instrukcji wykonywał się wielokrotnie w pętli, dopóki jeden lub grupa bitów jednocześnie w rejestrze ma wartość "0", na przykład gdy wciśnięty jest przycisk:
Gdzie, jak poprzednio, "REJESTR_IO" to nazwa rejestru, a "MASKA" to stała wartość z ustawionymi tymi bitami, które potrzeba testować
Instrukcje sterujące programem w języku C będą głównym tematem następnej, trzeciej części kursu.
A to kolejny przykładowy program, działa w następujący sposób: Jeśli jest wciśnięty pierwszy przycisk (przyłączony do PC0), to święcą się diody LED przyłączone do PD4..PD7, pozostałe LED są zgaszone. Jeśli wciśnięty jest drugi przycisk ( przyłączony PC1), to świecą się cztery diody podłączone do PD0..PD3, pozostałe LED gasną.
/* przykład 2.4 "leds4.c" */ /* 8 diod LED przłączonych do portu D */ /* 2 przyciski przyłączone do PC0,PC1 */ /* ATmega 1MHz */ #include <avr/io.h> int main(void) { /* Wszystkie linie portu D będą wyjściami */ DDRD = 0xff; /* linie PC0,PC1 będą wejściami z podciągnięciem do VCC */ DDRC = 0x00; PORTC = 0x03; /* Początek nieskończonej pętli */ while(1) { /* Jeśli pierwszy przycisk wciśnięty */ if(!(PINC & 0x01)) PORTD = 0xf0; /* Jeśli drugi przycisk wciśnięty */ if(!(PINC & 0x02)) PORTD = 0x0f; } }
Efekt działania programu z listingu 2.4
Omówię tylko te fragmenty listingu, w których jest coś nowego.
Linia programu poniżej testuje czy został wciśnięty przycisk przyłączony do PC0. Sprawdzane jest czy odpowiadający przyciskowi bit w rejestrze PINC ma wartość "0", jeśli tak to wykonuje się instrukcję wpisującą do rejestru PORTD wartość 0xf0.
Podobnie w kolejnej linii programu sprawdzany jest stan drugiego przycisku, podpietego do PC1; jeżeli jest wciśnięty, to do rejestru PORTD ładowana jest wartość 0x0f;
Odczytując stan przycisków podłączonych do portów uC napotyka się kłopotliwy efekt drgających styków przycisku. W momentach wciśnięcia i zwolnienia przycisku dostajemy na wejściu uC serie impulsów, co "źle" napisany program może błędnie zinterpretować jako wielokrotne wciśnięcie i zwolnienie przycisku.
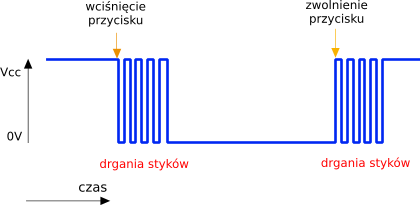
Drgania na stykach przycisku
Prostym i skutecznym sposobem ominięcia problemu drgających styków przycisku jest przeczekanie drgań. Po wykryciu wciśnięcia lub zwolnienia przycisku program może wstrzymać dalsze działanie na okres nieco dłuższy, niż spodziewany czas zaniku drgań styków. Pokaże to na kolejnym przykładzie, listing poniżej.
Kolejny program będzie zliczał każde wciśnięcie przycisku przyłączonego do PC0, a aktualny stan tego licznika będzie wyświetlany na ośmiu diodach LEd przyłączonych do portu D.
/* przykład 2.5 "leds5.c" */ /* 8 diod LED przłączonych do portu D */ /* przycisk przyłączony do PC0 */ /* ATmega 1MHz */ #define F_CPU 1000000L #include <avr/io.h> #include <util/delay.h> int main(void) { /* Wszystkie linie portu D będą wyjściami */ DDRD = 0xff; /* Linia PC0 będzie wejściem z podciągnięciem do VCC */ DDRC = 0x00; PORTC = 0x01; /* Początek nieskończonej pętli */ while(1) { /* Jeśli pierwszy przycisk wciśnięty */ if(!(PINC & 0x01)) { /* Zwiększenie stanu licznika o 1 */ PORTD +=1; /* opóżnienie aż drgania na stykach ustaną */ _delay_ms(80); /* oczekiwanie na zwolnienie przycisku */ while(!(PINC & 0x01)) {} /* opóżnienie aż drgania na stykach ustaną */ _delay_ms(80); } } }

Tutaj, w pętli sprawdzany jest stan przycisku, jeśli jest wciśnięty, to wykonywany jest blok instrukcji po "if" objęty parą nawiasów klamrowych, w przeciwnym przypadku stan przycisku testowany jest ponownie.
To kolejna postać operatora przypisania "+=", jak można się domyśleć, do rejestru PORTD zapisywana jest aktualna jego zawartość powiększona o wartość stałej stojącej po prawej stronie operatora "+=", w tym przypadku o 1.
Wstrzymanie działania programu na spodziewany czas wygaśnięcia drgań styków przycisku, czas wstrzymania programu dobrałem doświadczalnie.
Po ustaniu drgań styków, w następnej instrukcji, program testuje czy przycisk został zwolniony. W tym miejscu program zostanie uwięziony w wewnętrznej (zagnieżdżonej) pętli, wykonanej też z pomocą "while", do momentu zwolnienia przycisku. Po "while()", między nawiasami klamrowymi, jest pusto, program w pętli będzi "robił nic", zatrzma się w tym miejscu do chwili zwolnienia przycisku.
Ponowne wstrzymanie działania programu, aby wygasły drgania styków przycisku.
Nawias klamrowy zamyka nieskończoną pętlę
I to już wszystko w tej części kursu. Na zadanie domowe proponuje uruchomić program z listingu poniżej i samodzielnie przanalizować jego działanie. Jeśli znajdzie się coś w tym kodzie, o czym nie było jeszcze mowy, to porszę poszukać odpowiedzi swojej książce do języka C bądź w Internecie.
/* przykład 2.6 "leds6.c */ /* 8 diod LED przłączonych do portu D */ /* 2 przycisk przyłączone do PC0,PC1 */ /* Buzzer z generatorem przyłączony do PB1*/ /* ATmega 1MHz */ #define F_CPU 1000000L #include <avr/io.h> #include <util/delay.h> int main(void) { /* Wszystkie linie portu D będą wyjściami */ DDRD = 0xff; /* PB1 wyjście - buzzer z generatorem */ DDRB = 0x02; /* PC0,PC1 będą wejściami z podciągnięciem do VCC */ DDRC = 0x00; PORTC = 0x03; /* Początek nieskończonej pętli */ while(1) { /* Jeśli pierwszy przycisk wciśnięty */ if(!(PINC & 0x01)) { if(!PORTD) { /* Krótki sygnał dźwiękowy */ PORTB |= 0x02; _delay_ms(100); PORTB &= ~0x02; } else /* Wygasza jedną diodę LED */ PORTD >>= 1; /* Opóżnienie, aż drgania na stykach przycisku ustaną */ _delay_ms(80); /* Oczekiwanie na zwolnienie przycisku */ while(!(PINC & 0x01)) {} /* Opóżnienie, aż drgania na stykach przycisku ustaną */ _delay_ms(80); } /* Jeśli drugi przycisk wciśnięty */ if(!(PINC & 0x02)) { if(PORTD & 0X80) { /* Krótki sygnał dźwiękowy */ PORTB |= 0x02; _delay_ms(100); PORTB &= ~0x02; } else { /* Zapala jedną diodę LED */ PORTD <<= 1; PORTD |= 1; } /* Opóźnienie, aż drgania na stykach przycisku ustaną */ _delay_ms(80); /* Oczekiwanie na zwolnienie przycisku */ while(!(PINC & 0x02)) {} /* Opóżnienie, aż drgania na stykach przycisku ustaną */ _delay_ms(80); } } }
W następnej części kursu...
Tematem kolejnej części kursu będą: zmienne i stałe liczbowe, operatory oraz instrukcje sterujące programem. Dalej będziemy się bawić diodami LED, brzęczykiem i przyciskami.
Kurs AVR-GCC cz.1 | Kurs AVR-GCC cz.3